27多线程
1 概述
iOS开发中,多线程是必然碰到的,自己这两天有空稍微总结了一下。简单的概念如线程/进程等就不说了。
1.1 何为多线程?
多线程其实针对单核的CPU来设计的,CPPU同一时间只能执行一条线程,耳朵线程就是让CPU快速的在多个线程之间进行调度。
多线程优点:
- 能够适当提高资源利用率
- 能够适当提高资源利用率
缺点:
- 开线程需要一定的内存空间,默认一条线程占用栈区间512KB
- 线程过多会导致COU在线程上调度的开销比较大
- 程序设计比较复杂,比如线程间通信,多线程的数据共享
在iOS中其实有4套多线程方案,它们分别是:
- pthread
- NSThread
- GCD
- NSOperation
四种方案对比如下: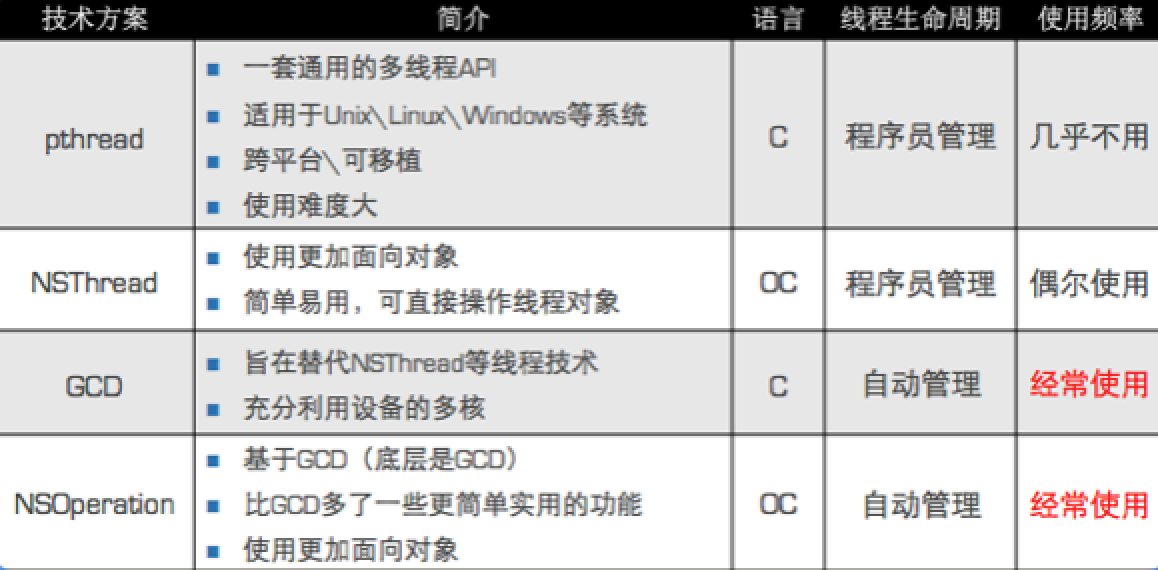
由于平时大多数只用到GCD和NSOperation,下面就主要讨论这两种多线程方案实现。
2 GCD简介
GCD以block为基本单位,一个block中的代码可以为一个任务。下文中提到 任务 ,可以理解为执行某个block
GCD有两大重要概念,分别是队列和执行方式;使用block的过程,概括来说就是把block放进合适的队列,并选择合适的执行方式去执行block的过程。
GCD有三种队列:
- 串行队列(先进入队列的任务先出队列,每次只执行一个任务)
- 并发队列 (依然是先进先出,不过可以形成多个任务并发)
- 主队列 (这是一个特殊的串行队列,而且队列中的任务 一定会在主线程中执行)
两种执行方式:
- 同步执行
- 异步执行
关于同步异步、串行并行和线程的关系,如下表格所示
| 同步 | 异步 | |
|---|---|---|
| 主队列 | 在主线程中执行 | 在主线程中执行 |
| 串行队列 | 在当前线程中执行 | 新建线程执行 |
| 并发队列 | 在当前线程中执行 | 新建线程执行 |
可以看到,同步方法不一定在本线程,异步方法亦不一定新开线程(主队列)
所以,我们在编程时考虑的是同步Or异步 以及 串行Or 并行,而不是仅仅考虑是否新开线程。
2.1 GCD死锁问题
在使用GCD的过程中,如果向当前串行队列中同步派发一个任务,就会导致死锁,例如:
以上代码就发生了死锁,控制台只能打印1。因为我们目前在主队列中,又将要同步地添加一个block到主队列(串行)中。
2.1.1 理论分析
dispatch_sync表示同步的执行任务,也就是说执行dispatch_sync后,当前队列会阻塞。而dispatch_sync中的block如果要在当前队列中执行,就得等待当前队列执行完成。
上面例子中,首先主队列执行任务1,然后执行dispatch_sync,随后在队列中新增一个任务2。因为主队列是同步队列,所以任务2要等dispatch_sync执行完才能执行,但是dispatch_sync是同步派发 ,要等任务2执行完才算是结束。在主队列中的两个任务互相等待,导致了死锁<\span>。当然,由于死锁,后面添加的任务3也不会执行了。
2.1.2 解决方案
通常情况下我们不必要用dispatch_sync,因为dispatch_async能够更好地利用CPU,提升程序运行速度。
只有当我们需要去把队列中的任务必须顺序执行时,才考虑使用dispatch_sync。在使用dispatch_sync的时候应该分析当前处于哪个队列,以及任务会提交到哪个队列。
2.2 GCD任务组
在开发中有这个需求,在A,B,C,D这四个任务全部结束后进行一些处理,那么我们怎么知道四个任务都已经执行完了呢? 这时候我们就需要用到dispatch_group了。
执行3次的打印结果如下:
首先我们要通过dispatch_group_create方法生成一个组然后我们把dispatch_async方法换成dispatch_group_async。这个方法多了一个参数,第一个参数填刚创建的分组。
最后调用dispatch_group_notify方法。这个方法表示把第三个参数block传入第二个参数队列中去。而且可以保证第三个参数block执行时,group中所有任务已经全部完成。
2.2.1 dispatch_group_wait
dispatch_group_wait 的完整定义如下:
第一个参数表示要等待的group,第二个则表示等待时间。返回值表示,经过指定的等待时间,属于这个group的任务是否已经全部执行完。如果是则返回0,否则返回非0。
第二个参数dispatch_time_t类型的参数还有两个特殊值:DISPATCH_TIME_NOW和DISPATCH_TIME_FOREVER,前者表示立刻检查这个group的任务是否已经完成,后者则表示一直到属于这个group的任务全部完成。
2.2.2 dispatch_after
通过GCD还可以进行简单的定时的操作,比如在1秒后执行某个block。代码如下:
输出为:
dispatch_after有三个参数。第一个表示时间,也就是从现在起往后1秒钟。第二个参数表示提交到哪个队列,第三个参数表示要提交的任务。
需要注意的是,dispatch_after仅表示在指定时间后提交任务 ,而非执行任务。如果任务提交到主队列,它将在main runloop中执行,对于每隔1/60秒执行一个的RunLoop1,任务最多可能在1+1/60秒后执行。
3 GCD进阶
GCD也有一些强大的特性。接下来我们主要讨论以下几个部分:
dispatch_suspend和dispatch_resumedispatch_oncedispatch_barrier_asyncdispatch_semaphore
我们知道NSOperationQueue有暂停suspend和恢复resume。其实GCD中的队列也有类似的功能。
这些函数不会影响到队列中已经执行的任务。队列暂停后,已经添加到队列中但是还没有执行的任务,不会执行,直到队列被恢复。
3.1 dispatch_once
dispatch_once在单例模式被广泛使用。dispatch_once函数可以确保某个block在应用程序执行过程中只被处理一次,而且它是线程安全的。所以单例模式可以很简单的实现,代码实现如下:
这段代码中我们创建一个值为nil的 shareInstance 静态对象,然后把它的初始化代码放到dispatch_once中完成。这样,只有第一次调用sharedInstance方法时才会进行对象的初始化,以后每次只是返回 shareInstance 而已。
3.2 dispatch_barrier_async
我们知道在写入时,不能再其他线程读取或写入。但是多个线程同时读取数据是没有问题的。所以我们可以把读取任务放入并行队列,把写入任务放入串行队列,并且保证写入任务执行过程中没有读取任务可以执行。这样的需求就比较常见,GCD提供了一个非常简单的解决方法 dispatch_barrier_async 。
假设我们有四个读取任务,在第二、三个任务之间有一个写入任务,代码大概如下:
如果代码这样写,由于几个block是并发执行,就有可能在前两个block中读取到已经修改了的数据。如果是有多写入任务,那问题更严重,可能会有数据竞争。
如果使用 dispatch_barrier_async 函数,代码就可以这么写:
dispatch_barrier_async会把队列的运行周期分为这三个过程:
- 首先等目前追加到并行队列中所有任务都执行完成。
- 开始执行
dispatch_barrier_async中的任务时,即便向并行队列提交任务,也不会执行。 dispatch_barrier_async中任务执行完成后,并行队列恢复正常。
总的来说,dispatch_barrier_async起到了承上启下的作用。它保证此前的任务都先于自己执行,此后的任务也迟于自己执行。正如barrier的含义一样,它起到一个栅栏或者分水岭的作用。
使用并行队列和 diapatch_barrier_async 方法,就可以高效的进行数据和文件读写了。
3.3 dispatch_semaphore
首先介绍一下信号量(semaphore)的概念。信号量是持有计数的信号,举个生活中的例子来看:
假设有一个房子,它对应进程的概念,房子里的人就对应着线程。一个进程可以包括多个线程。这个房子(进程)有很多资源,比如花园、客厅灯,是所有人(线程)共享的。
但是有些地方,比如卧室,最多只有两个人进去睡觉。怎么办呢?在卧室门口挂上两把钥匙。进去的人(线程)就拿着钥匙进去,没有钥匙就不能进去,出来的时候把钥匙放回门口。
这时候,门口的钥匙数量就称为信号量(Semaphore)。很明显,信号量为0时需要等待,信号量不为零时,减去1而且不等待。
在GCD中,创建信号量的代码如下:
这句代码通过diapatch_semaphore_create方法创建一个信号量初始值为3。然后就可以调用dispatch_semaphore_wait方法了。
dispatch_semaphore_wait方法表示一直等待直到信号量的值大于等于1,当这个方法执行后,会把第一个信号量参数的值减1。第二个参数是一个dispatch_time_t类型的时间,它表示这个方法最大的等待时间。
返回值也和dispatch_group_wait方法一样,返回0表示在规定的时间内 第一个参数信号量的值已经大于等于1,否则表示已超过规定等待时间,但信号量的值还是0。
dispatch_semaphore_wait方法返回0,因为此时的信号量的值大于等于1,任务获得了可以执行的权限。这时候我们就可以安全的执行需要进行排他控制的任务了。
任务结束时还需要调用dispatch_semaphore_signal()方法,将信号量的值加1。这类似于之前所说的,从卧室出来要把锁放回门上,否则后来的人就无法进入了。示例代码如下:
4 NSOperation
NSOperation 和 NSOperationQueue 主要介绍以下几个方面:
NSOperation和NSOperationQueue的用法介绍NSOperation的暂停、恢复和取消- 通过KVO对
NSOperation的状态进行检测 - 多个
NSOperation之间的依赖关系 - 进程间通信
NSOperation是对GCD中的block进行的封装,它也表示一个要被执行的任务。和GCD的block类似,NSOperation对象有一个start()方法表示开始执行这个任务。
不仅如此,NSOperation表示的任务还可以被取消。它还有三种状态isExecuted、isFinished和isCancelled以方便我们通过KVC对它的状态进行监听。
想要开始执行一个任务可以这么写:
打印结果如下:
我们创建了一个NSBlockOperation,并且设置好它的block,也就是要执行的任务。这个任务就会在主线程中执行。
为什么不直接使用NSOperation呢?因为NSOperation本身是一个抽象类,要使用可以通过以下几个方法:
- 使用
NSInvocationOperation - 使用
NSBlockOperation - 自定义
NSOperation的子类
NSBlockOperation可以用来封装一个或多个block。同时,还可以调用addExecutionBlock方法追加几个任务,这些任务会并行执行(也就是说很有可能运行在别的线程里)。最后,调用start方法让NSOperation方法运行起来。start是一个同步方法。
5 NSOperationQueue
从上面我们知道,默认的NSOperation是同步执行的。简单的看一下NSOperation类的定义会发现它只有一个只读属性asynchronous。这意味着如果想要异步执行,就需要自定义NSOperation的子类。或者使用NSOperationQueue。
NSOperationQueue类似于GCD中的队列。我们知道 GCD中的队列有三种:主队列、串行队列和并行队列。NSOperationQueue更简单,只有两种:主队列和非主队列 。
我们自己生成的NSOperationQueue对象都是非主队列,主队列可以用[NSOperationQueue mainQueue]取得。NSOperationQueue的主队列是串行队列,而且其中所有NSOperation都会在主线程中执行。
对于非主队列来说,一旦一个NSOperation被放入其中,那这个NSOperation一定是并发执行的。因为NSOperationQueue会为每一个NSOperation创建线程并调用它的start方法。
NSOperationQueue有一个属性叫maxConcurrentOperationCount,它表示最多支持多少个NSOperation并发执行。如果maxConCurrentOperationCount被设置为1,就以为这个队列是串行队列。因此,NSOperationQueue和GCD中的队列有这样的对应关系:
| NSOperation | GCD | |
|---|---|---|
| 主队列 | [NSOperationQueue mainQueue] | dispatch_get_mian_queue() |
| 串行队列 | 自建队列 maxConcurrentOperationCount为1 | dispatch_queue_create(“”,DISPATCH_QUEUE_SERIAL) |
| 并发队列 | 自建队列 maxConcurrentOperationCount大于1 | dispatch_queue_create(“”,DISPATCH_QUEUE_CONCURRENT) |
如何利用NSOperationQueue实现异步操作?代码如下:
执行3次结果如下:
使用NSOperationQueue来执行任务与之前的区别在于,首先创建一个非主队列。然后用addOperation方法替换之前的start方法。刚刚已经说过,NSOperationQueue会为每一个NSOperation创建线程并调用它们的start方法。
观察一下运行结果 ,所有的NSOperation都没有在主线程执行,从而成功的实现了异步、并行处理。
5.1 取消任务
如果我们有两次网络请求,第二次请求会用到第一次的数据。假设此时网络情况不好,第一次请求超时了,那么第二次请求也没有必要发送了。当然,用户也有可能人为地取消某个NSOperation。
当某个NSOperation被取消时,我们应该尽可能的清除NSOperation内部的数据并且把cancel和finished设为true,把executing设为false。
5.2 设置依赖
有时候一个网络请求是用到另一个网络请求获得的数据,这时候我们要确保第二次请求时,第一个请求已经执行完。但是我们同时还希望用到NSOperationQueue的并发特性(因为可能不止这两个任务)
这时候我们可以设置NSOperation之间的依赖关系,很简单,代码如下:
需要注意的是,NSOperation之间的相互依赖会导致死锁。
5.3 NSOperationQueue暂停与恢复
这个也很简单,只要修改suspended属性即可:
5.4 NSOperation优先级
GCD中,任务(block)是没有优先级的,而队列具有优先级。和GCD相反,我们一般考虑NSOperation的优先级。
NSOperation有一个NSOperationQueuePriority枚举类型的属性queuePriority。
需要注意的是,NSOperationQueue也不能完全保证优先级高的任务 一定先执行。
5.5 进程间通信
有时候我们在子线程中执行完一些操作的时候,需要回到主线程做一些事情(如进行UI操作),因此需要从当前线程回到主线程,以下载并显示图片为例,代码如下:
6 小结
6.1 NSOperation和GCD如何选择
GCD以block为单位,代码简洁。同时GCD中的队列、组、信号量、source、barriers都是组成并行编程的基本原语。对于一次性的计算,或者仅仅为了加快现有方法的运行速度,选择轻量化的GCD就更加方便。
NSOperation可以用来规划一组任务之间的依赖关系,设置它们的优先级,任务能被取消。队列可以暂停、恢复。NSOperation还可以自定义子类。这些都是GCD没有具备的。可以根据情况有效结合
NSOperation和GCD一起使用。
最后,有个很经典的面试题,GCD和NSOperation有什么区别?
答案基本就是对上面所说的的总结:
- GCD是纯C语言的API,
NSOperation是基于GCD的OC版本封装。 - GCD只支持FIFO的队列,
NSOperation可以很方便地调整执行顺序,设置最大并发数量。 NSOperationQueue可以轻松在operation间设置依赖关系,而GCD需要写很多代码才能实现。NSOperationQueue支持KVO,可以检测operation是否正在执5.行(isExecuted),是否结束(isFinisn),是否取消(isCancel)。- GCD的执行速度比
NSOperation快。
